Hallo,
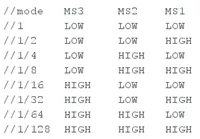
auf den ersten Blick mag das Thema Schrittmotoren nicht so ganz in ein Mikroskopieforum passen. Sieht man sich die Eigenschaften von diesen Motoren gemeinsam mit speziellen Motortreibern jedoch genauer an und denkt sich diese z.B. statt der Hand am Feintrieb, wird es gerade für den Bereich Stacking interessant. Die üblichen Schrittmotoren haben meist die Fähigkeit sich mit 1,8 Grad pro Schritten zu drehen, also 200 Schritte pro Umdrehung, wobei jeder einzelne dieser Schritte exakt wieder angefahren werden kann. Um nun aus den 200 Schritten/Umdrehung mehr zu machen kann man entweder ein Getriebe benutzen, oder eben einen elektronischen Motortreiber benutzen. Diese Treiber unterteilen die 1,8 Grad Schritte noch einmal in sogenannte Microsteps, wobei diese je nach Model 1/8, 1/16, 1/32, u.s.w der Schrittweite des Motors betragen können. In diesen Beitrag werde ich zeigen wie der Betrieb eines solchen Motors mit einem Raps128 Schrittmotortreibers und deren Steuerung mithilfe eines Arduino Uno funktioniert. Wie der Name schon andeutet handelt es sich um den Raps128 Treiber um einen 1/128 Microstep Treiber. Er macht also aus 200 Schritte/Umdrehung ganze 25600 Schritte/Umdrehung, oder 0,014° Drehung/Schritt, damit ist durchaus schon was anzufangen.
Natürlich geht es nicht ohne einzukaufen, deshalb hier 2 Linklisten. Eine deutlich günstigere und eine mit langlebigeren Links, da die Günstigere auf ebay Angeboten aus Fernost basiert.
Günstiger:
400 Kontakte Steckbrett Solderless Breadboard Experimentierboard Steckplatine | eBay
Breadboard Steckbrücken Jump Line Jumper Wire 140 Roots 14 Kinds Set
40x 20cm Male-Male jumper wire cable Kabel für Arduino Breadboard Drahtbrücken | eBay
Schrittmotor Stepper Motor Nema17 42BYGHW609 4000g.cm1.7A 3D Drucker RepRap GBNG | eBay
UNO R3 Rev3 Board ATmega328P ATMEGA16U2 kompatibel Arduino + USB Kabel | eBay
3DJAKE RAPS128 Schrittmotortreiber | 3DJake.at
4 Stück Schraubklemmblock 1.50 mm² Polzahl 2 AKZ500/2DS-5.08-V PTR Grau 1 St. zum Conrad Online-Shop | 000731877
Elektrolyt-Kondensator radial bedrahtet 2.5 mm 100 µF 35 V 20 % (Ø x L) 6.3 mm x 11 mm Teapo SY 100uF/35V 6,3x11mm 1 St. zum Conrad Online-Shop | 000443974
Langlebigere Links:
Steckplatine Polzahl Gesamt 400 (L x B x H) 84 x 54 x 8.5 mm EIC-801 1 St. auf conrad.at bestellen | 000526819
Steckbrücken-Set (L x B x H) 168 x 55.5 x 14.5 mm EIC-J-S 70 St. online auf conrad.at bestellen | 000524530
Steckbrücke Lila 10 St. auf conrad.at online bestellen | 000528080
electronic things - NEMA17 Schrittmotor 42BYGHW609
Arduino Board Uno Rev3 – DIP Version ATMega328 online auf conrad.at bestellen | 001275279
3DJAKE RAPS128 Schrittmotortreiber | 3DJake.at
4 Stück Schraubklemmblock 1.50 mm² Polzahl 2 AKZ500/2DS-5.08-V PTR Grau 1 St. zum Conrad Online-Shop | 000731877
Elektrolyt-Kondensator radial bedrahtet 2.5 mm 100 µF 35 V 20 % (Ø x L) 6.3 mm x 11 mm Teapo SY 100uF/35V 6,3x11mm 1 St. zum Conrad Online-Shop | 000443974
Die Shops sind natürlich nur Beispiele von vielen und es bleibt jeden selbst überlassen ob er diese Teile dort bestellt, oder ganz wo anders. Ich selbst profitiere jedenfalls in keinster Weise von diesen beiden Listen.
Zusätzlich brauchen wir die Arduino Software, ein Programm mit dem die Sketche (Steuerungsprogramme) erstellt und auf den Arduino hochgeladen werden.
https://www.arduino.cc/en/Main/Software
Eine 12 Volt Quelle mit min. 1 Ampere und eventuell ein einfacher Voltmeter.
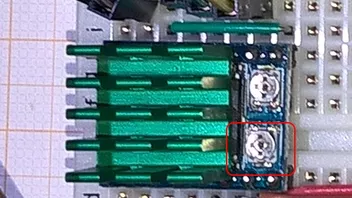
Ist alles geliefert, fangen wir an den Motortreiber, ein paar Drahtbrücken und den Kondensator wie auf dem Bild auf die Steckplatine zu stecken.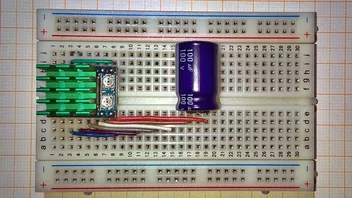
Der Motortreiber ist ganz links und belegt dabei Zeile e und h von Spalte 1-8
Die Drahtbrücken gehen von:
j3 zu j4
i3 zu i8
d8 zu d19
d7 zu d17
d6 zu c15
d5 zu c13
c4 zu c11 und von c3 zu c9
Der Elektrolytkondensator kommt mit seinem Minuspol auf e17 und der Pluspol auf e19. Die Polung ist bitte unbedingt einzuhalten.
Nun werden 3 der 2 poligen Klemmen zusammengesteckt und wie folgt auf das Breadboard platziert.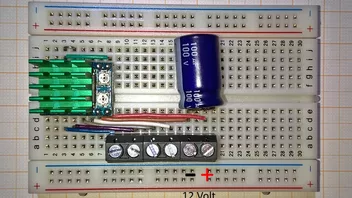
Die Beinchen der Klemmen kommen also auf die Positionen a9, a11, a13, a15, a17 und a19. Die rechten 2 Klemmen dienen der Motorstromversorgung (auf die Polung achten) und an die Übrigen kommt der Motor selbst.
Nun muss der Arduino, das Gehirn des Ganzen, noch angeschlossen werden.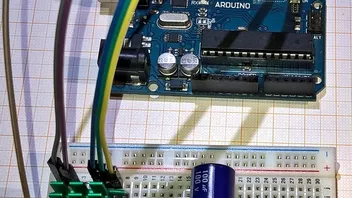
Die Verbindungen sind folgende:
a1 zu Arduino GND (welches ist eigentlich egal)
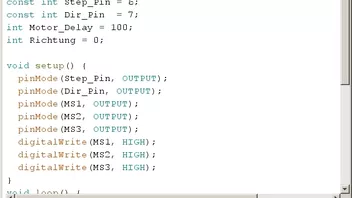
j1 zu Arduino Digital 7 (steuert die Laufrichtung des Motors)
j2 zu Arduino Digital 6 ( ein kurzes Signal über diese Leitung lässt den Motor einen Schritt machen, viele kurze Signale nacheinander...)
j5 zu Arduino Digital 5 ( )
j6 zu Arduino Digital 4 ( diese 3 dienen zur Einstellung des Microstep-Modus des Treibers )
j7 zu Arduino Digital 3 ( )
Nach dem Gehirn kommt nun der Muskel und der Rest dran, aber bitte zuerst den Motor anschließen !!!
Der Motortreiber mag es nämlich gar nicht ohne angeschlossene Last mit Strom versorgt zu werden und geht sofort kaputt.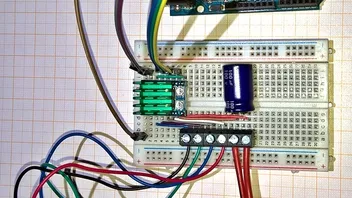
Von Links nach Rechts gehören nun das schwarze, grüne, blau und rote Kabel in die Klemmen fixiert, danach kommt der Minuspol und der Pluspol der noch stromlosen 12 Volt Motorstromversorgung. Spätestens jetzt sollte die Arduino Software auf dem PC installiert werden, da sie auch die notwendige Treibersoftware enthält. Der Arduino kann nun mit dem, hoffentlich mitgelieferten, USB-Kabel mit dem PC verbunden werden. Danach sollte der Treiber automatisch installiert werden (Windows, bei anderen Betriebsystemen weiß ich es nicht) und danach Wechseln wir zur Softwareebene des Ganzen.
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////